
تین فیز غیر مطابقت پذیرموٹرانڈکشن موٹر کی ایک قسم ہے جو بیک وقت 380V تھری فیز AC کرنٹ (120 ڈگری کا فیز فرق) کو جوڑنے سے چلتی ہے۔ اس حقیقت کی وجہ سے کہ تھری فیز غیر مطابقت پذیر موٹر کا روٹر اور سٹیٹر گھومنے والا مقناطیسی میدان ایک ہی سمت میں اور مختلف رفتار سے گھومتا ہے، اس میں پرچی کی شرح ہوتی ہے، اس لیے اسے تھری فیز اسینکرونس موٹر کہا جاتا ہے۔
تین فیز غیر مطابقت پذیر موٹر کے روٹر کی رفتار گھومنے والے مقناطیسی میدان کی رفتار سے کم ہے۔ روٹر وائنڈنگ مقناطیسی میدان کے ساتھ رشتہ دار حرکت کی وجہ سے الیکٹرو موٹیو قوت اور کرنٹ پیدا کرتی ہے، اور توانائی کی تبدیلی کو حاصل کرتے ہوئے، برقی مقناطیسی ٹارک پیدا کرنے کے لیے مقناطیسی میدان کے ساتھ تعامل کرتی ہے۔
سنگل فیز غیر مطابقت پذیر کے ساتھ موازنہموٹرز، تین فیز غیر مطابقت پذیرموٹرزبہتر آپریٹنگ کارکردگی ہے اور مختلف مواد کو بچا سکتا ہے۔
مختلف روٹر ڈھانچے کے مطابق، تین فیز غیر مطابقت پذیر موٹرز کو پنجرے کی قسم اور زخم کی قسم میں تقسیم کیا جا سکتا ہے۔
کیج روٹر کے ساتھ غیر مطابقت پذیر موٹر ایک سادہ ساخت، قابل اعتماد آپریشن، ہلکے وزن، اور کم قیمت ہے، جو بڑے پیمانے پر استعمال کیا گیا ہے. اس کی بنیادی خرابی رفتار کے ضابطے میں دشواری ہے۔
زخم کی تھری فیز غیر مطابقت پذیر موٹر کا روٹر اور سٹیٹر بھی تھری فیز وائنڈنگز سے لیس ہوتا ہے اور سلپ رِنگز، برشز کے ذریعے بیرونی ریوسٹیٹ سے جڑا ہوتا ہے۔ ریوسٹیٹ کی مزاحمت کو ایڈجسٹ کرنے سے موٹر کی ابتدائی کارکردگی کو بہتر بنایا جا سکتا ہے اور موٹر کی رفتار کو ایڈجسٹ کیا جا سکتا ہے۔
تین فیز غیر مطابقت پذیر موٹر کے کام کرنے کا اصول
جب تھری فیز سٹیٹر وائنڈنگ پر سڈول تھری فیز الٹرنیٹنگ کرنٹ لاگو کیا جاتا ہے، تو ایک گھومنے والا مقناطیسی میدان پیدا ہوتا ہے جو سٹیٹر اور روٹر کی اندرونی سرکلر اسپیس کے ساتھ ساتھ گھڑی کی سمت میں مطابقت پذیر رفتار n1 پر گھومتا ہے۔
چونکہ گھومنے والا مقناطیسی میدان n1 کی رفتار سے گھومتا ہے، اس لیے روٹر کنڈکٹر شروع میں ساکن ہوتا ہے، اس لیے روٹر کنڈکٹر محرک الیکٹرو موٹیو قوت پیدا کرنے کے لیے اسٹیٹر کو گھومنے والے مقناطیسی میدان کو کاٹ دے گا (حوصلہ افزائی الیکٹرو موٹیو قوت کی سمت کا تعین دائیں ہاتھ کے اصول سے کیا جاتا ہے)۔
شارٹ سرکٹ کی انگوٹی کے ذریعہ دونوں سروں پر روٹر کنڈکٹر کی شارٹ سرکٹنگ کی وجہ سے، حوصلہ افزائی الیکٹرو موٹیو فورس کے عمل کے تحت، روٹر کنڈکٹر ایک حوصلہ افزائی کرنٹ پیدا کرے گا جو بنیادی طور پر اسی سمت میں ہوتا ہے جس میں الیکٹرو موٹیو فورس ہوتی ہے۔ روٹر کا کرنٹ لے جانے والا کنڈکٹر سٹیٹر میگنیٹک فیلڈ میں برقی مقناطیسی قوت کا نشانہ بنتا ہے (قوت کی سمت کا تعین بائیں ہاتھ کے اصول سے کیا جاتا ہے)۔ برقی مقناطیسی قوت روٹر شافٹ پر برقی مقناطیسی ٹارک پیدا کرتی ہے، روٹر کو گھومنے والے مقناطیسی میدان کی سمت میں گھومنے کے لیے چلاتی ہے۔
مندرجہ بالا تجزیہ کے ذریعے، یہ نتیجہ اخذ کیا جا سکتا ہے کہ ایک برقی موٹر کا کام کرنے کا اصول مندرجہ ذیل ہے: جب موٹر کے تھری فیز سٹیٹر وائنڈنگز (ہر ایک 120 ڈگری برقی زاویہ کے فرق کے ساتھ) کو تھری فیز سڈول الٹرنیٹنگ کرنٹ سے کھلایا جاتا ہے، تو ایک گھومنے والا مقناطیسی فیلڈ جو روٹینگ روجنریٹ میں پیدا ہوتا ہے اور کرنٹ پیدا ہوتا ہے۔ روٹر وائنڈنگ (روٹر وائنڈنگ ایک بند سرکٹ ہے)۔ موجودہ لے جانے والا روٹر کنڈکٹر سٹیٹر گھومنے والے مقناطیسی فیلڈ کی کارروائی کے تحت برقی مقناطیسی قوت پیدا کرے گا، اس طرح موٹر شافٹ پر برقی مقناطیسی ٹارک بنتا ہے، موٹر کو اسی سمت میں گھومنے کے لیے چلاتا ہے جس طرح گھومنے والا مقناطیسی میدان ہے۔
تھری فیز اسینکرونس موٹر کا وائرنگ ڈایاگرام
تین فیز غیر مطابقت پذیر موٹروں کی بنیادی وائرنگ:
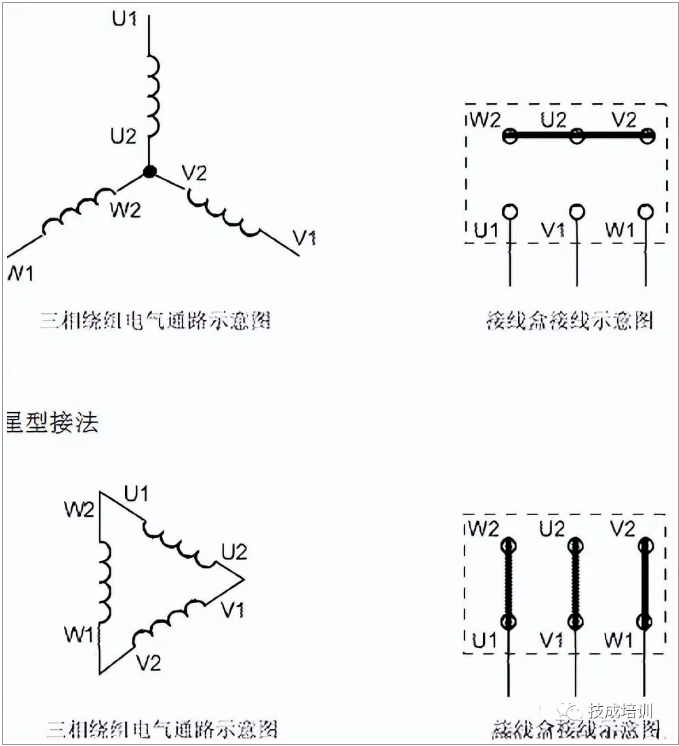
تھری فیز اسینکرونس موٹر کے وائنڈنگ سے چھ تاروں کو کنکشن کے دو بنیادی طریقوں میں تقسیم کیا جا سکتا ہے: ڈیلٹا ڈیلٹا کنکشن اور اسٹار کنکشن۔
چھ تاریں = تین موٹر وائنڈنگز = تھری ہیڈ اینڈز + تھری ٹیل اینڈز، ایک ملٹی میٹر کے ساتھ ایک ہی وائنڈنگ کے ہیڈ اور ٹیل اینڈز کے درمیان کنکشن کی پیمائش کرتا ہے، یعنی U1-U2، V1-V2، W1-W2۔
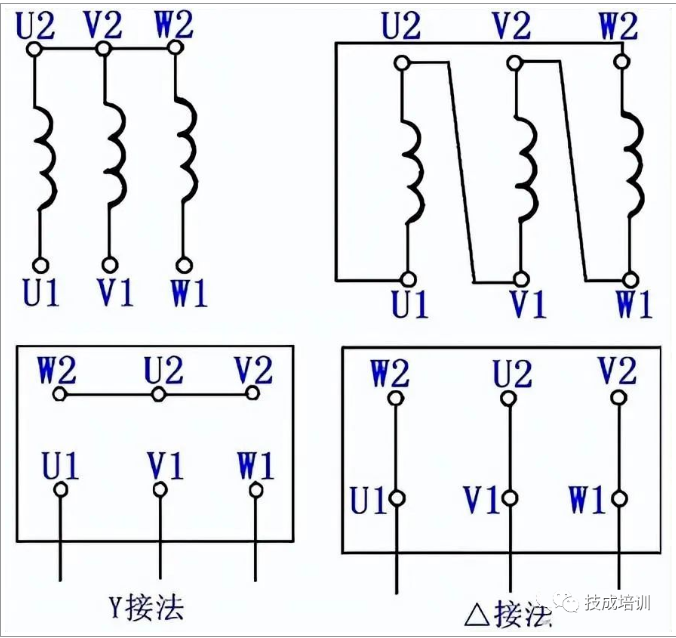
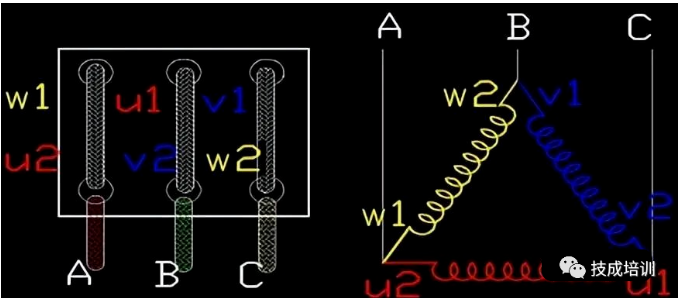
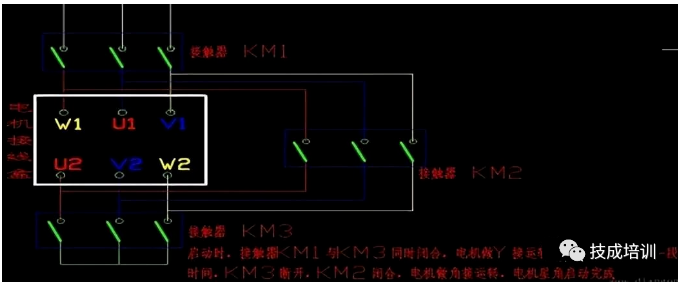
1. تین فیز غیر مطابقت پذیر موٹرز کے لیے مثلث ڈیلٹا کنکشن کا طریقہ
مثلث ڈیلٹا کنکشن کا طریقہ یہ ہے کہ تین وائنڈنگز کے سروں اور دموں کو ترتیب سے جوڑ کر مثلث بنائیں، جیسا کہ تصویر میں دکھایا گیا ہے:
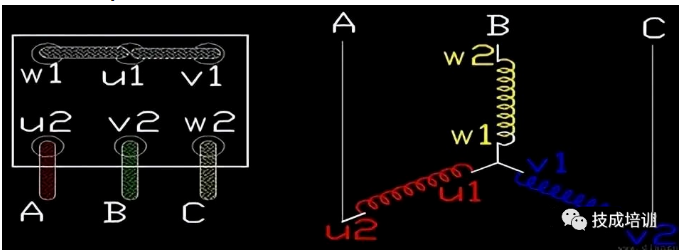
2. تھری فیز غیر مطابقت پذیر موٹرز کے لیے سٹار کنکشن کا طریقہ
اسٹار کنکشن کا طریقہ یہ ہے کہ تین وائنڈنگز کی دم یا سر کے سروں کو جوڑ دیا جائے، اور باقی تین تاروں کو پاور کنکشن کے طور پر استعمال کیا جاتا ہے۔ کنکشن کا طریقہ جیسا کہ تصویر میں دکھایا گیا ہے:
اعداد و شمار اور متن میں تھری فیز اسینکرونس موٹر کے وائرنگ ڈایاگرام کی وضاحت
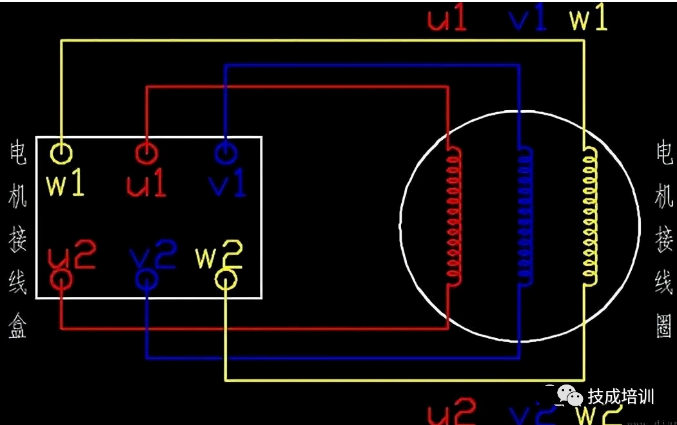
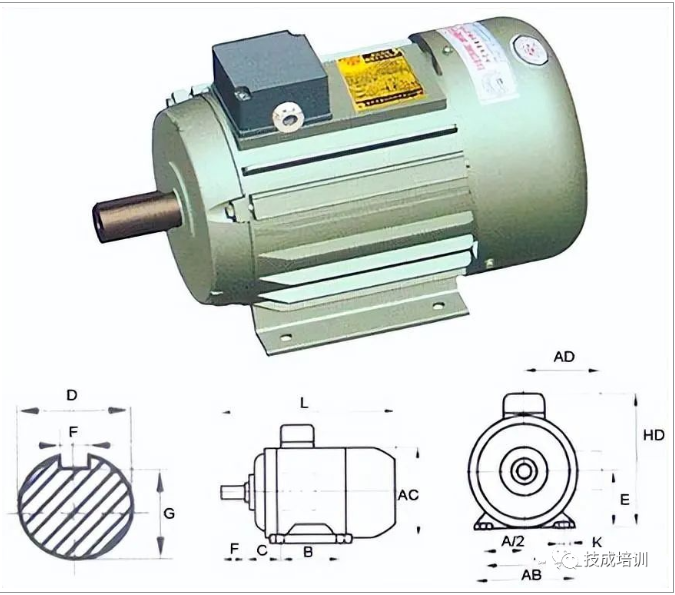
تین فیز موٹر جنکشن باکس
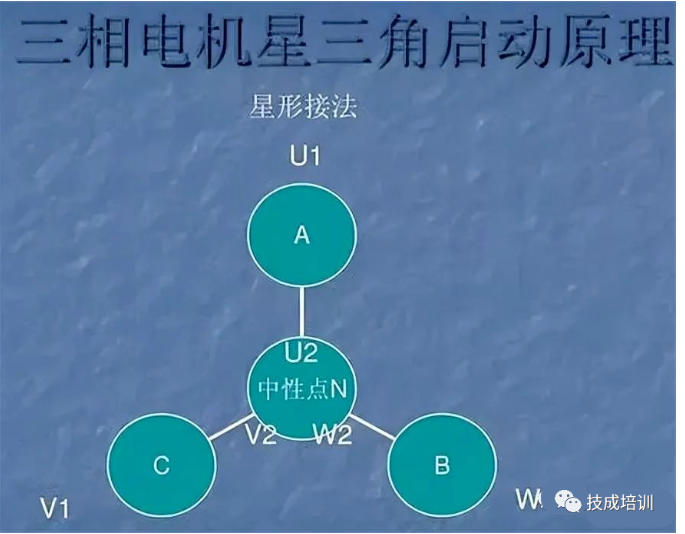
جب تھری فیز غیر مطابقت پذیر موٹر منسلک ہوتی ہے، جنکشن باکس میں کنیکٹنگ پیس کا کنکشن کا طریقہ درج ذیل ہے:
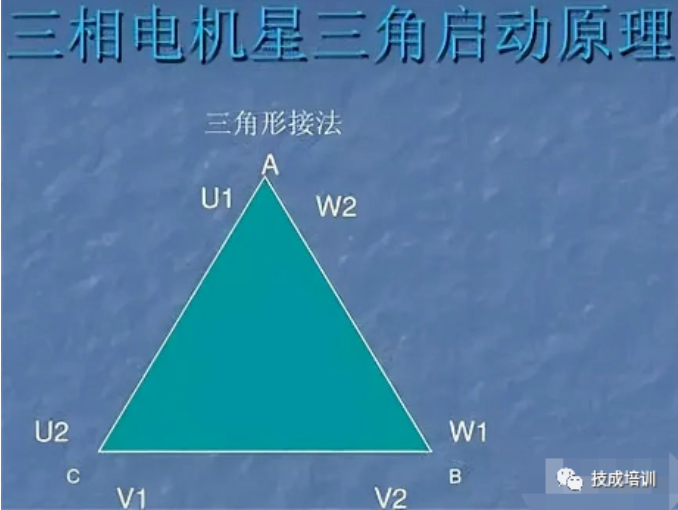
جب تھری فیز غیر مطابقت پذیر موٹر کونے سے منسلک کیا جاتا ہے تو، جنکشن باکس کنکشن پیس کے کنکشن کا طریقہ درج ذیل ہے:
تھری فیز اسینکرونس موٹرز کے لیے کنکشن کے دو طریقے ہیں: اسٹار کنکشن اور ٹرائی اینگل کنکشن۔
مثلث کا طریقہ
ایک ہی وولٹیج اور تار کے قطر کے ساتھ وائنڈنگ کنڈلیوں میں، ستارہ کنکشن کے طریقہ کار میں فی فیز تین گنا کم موڑ (1.732 بار) اور مثلث کنکشن کے طریقے سے تین گنا کم طاقت ہوتی ہے۔ تیار شدہ موٹر کے کنکشن کا طریقہ 380V کے وولٹیج کو برداشت کرنے کے لیے طے کیا گیا ہے اور عام طور پر ترمیم کے لیے موزوں نہیں ہے۔
کنکشن کا طریقہ صرف تب تبدیل کیا جا سکتا ہے جب تھری فیز وولٹیج کی سطح عام 380V سے مختلف ہو۔ مثال کے طور پر، جب تھری فیز وولٹیج کی سطح 220V ہے، تو اصل تھری فیز وولٹیج 380V کے اسٹار کنکشن کے طریقہ کار کو مثلث کنکشن کے طریقہ کار میں تبدیل کرنا لاگو ہو سکتا ہے۔ جب تھری فیز وولٹیج کی سطح 660V ہے، تو اصل تھری فیز وولٹیج 380V ڈیلٹا کنکشن کا طریقہ اسٹار کنکشن کے طریقہ کار میں تبدیل کیا جا سکتا ہے، اور اس کی طاقت میں کوئی تبدیلی نہیں ہوتی۔ عام طور پر، کم طاقت والی موٹریں ستارے سے منسلک ہوتی ہیں، جبکہ زیادہ طاقت والی موٹریں ڈیلٹا سے منسلک ہوتی ہیں۔
ریٹیڈ وولٹیج پر، ڈیلٹا سے منسلک موٹر استعمال کی جانی چاہیے۔ اگر اسے ستارے سے منسلک موٹر میں تبدیل کیا جاتا ہے، تو اس کا تعلق کم وولٹیج کے آپریشن سے ہے، جس کے نتیجے میں موٹر کی طاقت میں کمی اور کرنٹ شروع ہوتا ہے۔ ہائی پاور موٹر (ڈیلٹا کنکشن کا طریقہ) شروع کرتے وقت کرنٹ بہت زیادہ ہوتا ہے۔ لائن پر شروع ہونے والے کرنٹ کے اثرات کو کم کرنے کے لیے، عام طور پر سٹیپ ڈاون سٹارٹنگ کو اپنایا جاتا ہے۔ ایک طریقہ یہ ہے کہ شروع کرنے کے لیے اصل ڈیلٹا کنکشن کے طریقے کو اسٹار کنکشن کے طریقے میں تبدیل کیا جائے۔ اسٹار کنکشن کا طریقہ شروع ہونے کے بعد، اسے آپریشن کے لیے واپس ڈیلٹا کنکشن کے طریقے میں تبدیل کر دیا جاتا ہے۔
تھری فیز اسینکرونس موٹر کا وائرنگ ڈایاگرام
تھری فیز اسینکرونس موٹرز کے لیے فارورڈ اور ریورس ٹرانسفر لائنوں کا فزیکل ڈایاگرام:
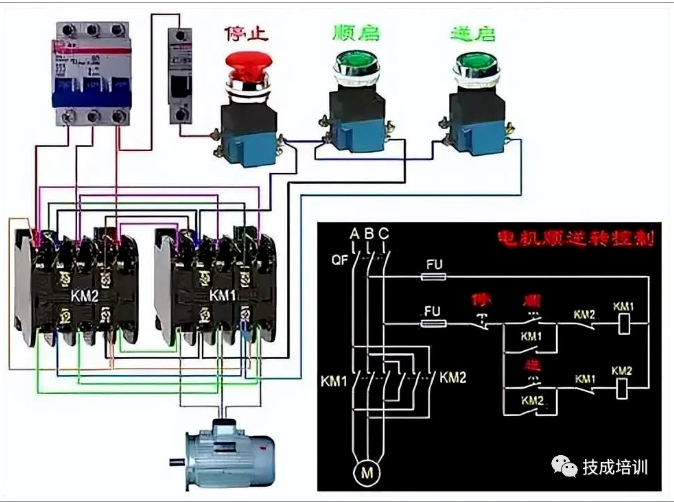
موٹر کے آگے اور ریورس کنٹرول حاصل کرنے کے لیے، اس کی پاور سپلائی کے کسی بھی دو مراحل کو ایک دوسرے کے مقابلے میں ایڈجسٹ کیا جا سکتا ہے (ہم اسے کمیوٹیشن کہتے ہیں)۔ عام طور پر، V فیز میں کوئی تبدیلی نہیں ہوتی ہے، اور U فیز اور W فیز ایک دوسرے کے مقابلے میں ایڈجسٹ ہوتے ہیں۔ اس بات کو یقینی بنانے کے لیے کہ موٹر کے فیز سیکونس کو قابل اعتماد طریقے سے تبدیل کیا جا سکتا ہے جب دو کنیکٹرز کام کرتے ہیں، رابطے کے اوپری بندرگاہ پر وائرنگ ایک جیسی ہونی چاہیے، اور فیز کو رابطہ کار کی نچلی بندرگاہ پر ایڈجسٹ کیا جانا چاہیے۔ دو مرحلوں کے فیز سیکوینس کی تبدیلی کی وجہ سے، اس بات کو یقینی بنانا ضروری ہے کہ دو KM کنڈلی کو ایک ہی وقت میں آن نہیں کیا جا سکتا، بصورت دیگر فیز ٹو فیز شارٹ سرکٹ میں سنگین خرابیاں ہو سکتی ہیں۔ اس لیے انٹر لاکنگ کو اپنانا چاہیے۔
حفاظتی وجوہات کی بناء پر، بٹن انٹرلاکنگ (مکینیکل) اور کونٹیکٹر انٹر لاکنگ (الیکٹریکل) کے ساتھ ڈبل انٹر لاکنگ فارورڈ اور ریورس کنٹرول سرکٹ اکثر استعمال کیا جاتا ہے۔ بٹن انٹرلاکنگ کا استعمال کرتے ہوئے، یہاں تک کہ اگر فارورڈ اور ریورس بٹن ایک ساتھ دبائے جائیں، فیز ایڈجسٹمنٹ کے لیے استعمال ہونے والے دو کنٹیکٹرز کو ایک ساتھ نہیں چلایا جا سکتا، میکانکی طور پر فیز ٹو فیز شارٹ سرکٹس سے گریز کریں۔
اس کے علاوہ، اپلائیڈ کنٹیکٹرز کے آپس میں بند ہونے کی وجہ سے، جب تک کسی ایک کو آن کیا جاتا ہے، اس کا طویل بند رابطہ بند نہیں ہوگا۔ اس طرح، مکینیکل اور الیکٹریکل ڈوئل انٹر لاکنگ کے اطلاق میں، موٹر کے پاور سپلائی سسٹم میں فیز ٹو فیز شارٹ سرکٹ نہیں ہو سکتے، موٹر کو مؤثر طریقے سے تحفظ فراہم کرتے ہیں اور فیز ماڈیولیشن کے دوران فیز ٹو فیز شارٹ سرکٹ کی وجہ سے ہونے والے حادثات سے بچتے ہیں، جو کنیکٹر کو جلا سکتے ہیں۔
پوسٹ ٹائم: اگست 07-2023


